
LAB 7: SISTEMAS DE CONTROL AUTOMATICO
INFORME:
"APLICACIONES DE SENSORES EN SISTEMAS DE CONTROL AUTOMATICO"
-
INTRODUCCION
El presente trabajo de investigación y aplicación presenta conceptos teóricos, formulas y ejercicios del uso de los sensores para procesos industriales, como la supervision y control de temperatura en un tanque con determinado material correspodiente al proceso, para posteriormente tomar acciones de control ante variaciones, ademas con los sensores de movimiento es posible implementar sistemas de seguridad automáticos y por ultimo la medicion de distancias de objetos con los sensores ultrasonicos.
2. OBJETIVOS
Los objetivos principales de este informe son los siguientes:
-
Dar a comprender las formulas de los Sensores NTC Y RTD, de Movimiento y Ultrasonico.
-
Explicar el método de empleo de dichas para la realización de código de programación en C++.
-
Demostración de la ejecución de las formulas en el código en el software Dev C++, además de adjuntar sus respectivas pruebas.
-
Demostrar mis conocimientos de los comandos, funciones o subprogramas y estructura de datos de fórmulas en Dev C++.
3. JUSTIFICACION
El tema es de suma importancia ya que es uno de los principales sensores usados en los procesos de control automáticos, en los sectores de alimentos, materiales, etc; importante para el estudio de la Electrónica, por lo cual nos brinda información muy útil en especial para nosotros que ya estamos adentrándonos mucho más en la carrera.
4. MARCO TEORICO
4.1. Sensor de temperatura Termistor NTC
Un sensor de temperatura es un componente electrónico que devuelve una señal eléctrica que depende de la temperatura del sensor. A partir de la señal eléctrica se puede conocer la temperatura real a la que se encuentra el sensor.
Existen muchos tipos diferentes de sensores de temperatura. Cada tipo de sensor se adapta bien a una aplicación concreta. En estas prácticas se van a estudiar solo sensores de bajo precio que alcanzan un rango de temperaturas moderado, de -40ºC hasta 150ºC. Con una exactitud moderada, desde 1ºC hasta 0.1ºC de error.
Sensor de temperatura NTC.
Sensor de temperatura basado en circuito integrado LM35.
Los sensores de temperatura son muy útiles para construir aparatos de medida de temperatura y máquinas que regulan de forma automática la temperatura. A continuación se listan algunos ejemplos prácticos.
-
Termómetro digital para medir la temperatura del cuerpo.
-
Termostato digital de una casa.
-
Termostato de temperatura de un horno.
-
Sensor de incendios.
-
Termostato de acuario o de terrario.
-
Termómetro digital de temperatura ambiente.
Funcionamiento de un sensor NTC
Una resistencia NTC es un componente que reduce su resistencia cuando aumenta la temperatura. Este sensor no es lineal. Esto quiere decir que su exactitud no es muy buena en rangos amplios de temperatura, comparada con otros sensores. A pesar de eso un sensor NTC bien ajustado puede medir temperaturas con bastante exactitud, 0.1ºC en un intervalo pequeño de temperaturas.
La siguiente gráfica representa la resistencia de un sensor NTC en su rango de medición de temperaturas:
Se puede calcular la ecuación que rige la resistencia del termistor NTC siendo la siguiente:
siendo:
Rt= el valor de la resistencia a la temperatura T (en grados Kelvin. 0ºC=273,15ºK).
A = una constante que depende del termistor NTC, y representa el valor de la resistencia del termistor NTC cuando la temperatura es supuestamente infinita.
e= Numero de Euler=2,71828
B = es la resistencia característica del material de que está hecho el termistor NTC. Su valor esta comprendido entre 2000ºK y 4000ºK.
Calculo de las constantes A y B:
Los fabricantes no suelen dar los valores de A y B por lo que hay que calcularlos según los valores de la resistencia RT a diferentes temperaturas. Para ello se realiza la siguiente consideración:
de donde igualando A para dos valores de R0 y T0 se obtiene:
de donde despejando B:
siendo R1 y R2 las resistencias del termistor NTC a las temperaturas T1 y T2 respectivamente. Una vez conocido B se puede calcular el valor de A sin más que sustituirlo en la ecuación (2) para una temperatura y resistencia de referencia (R0 y T0 a 25ºC, o 0ºC por ejemplo).
4.2. SENSOR DE TEMPERATURA RTD:
Un RTD (del inglés: resistance temperature detector) es un detector de temperatura resistivo, es decir, un sensor de temperatura basado en la variación de la resistencia de un conductor con la temperatura. Su símbolo es el siguiente, en el que se indica una variación lineal con coeficiente de temperatura positivo.
Al calentarse un metal habrá una mayor agitación térmica, dispersándose más los electrones y reduciéndose su velocidad media, aumentando la resistencia. A mayor temperatura, mayor agitación, y mayor resistencia.
La variación de la resistencia puede ser expresada de manera polinómica como sigue a continuación. Por lo general, la variación es bastante lineal en márgenes amplios de temperatura.
donde:
-
R0 es la resistencia a la temperatura de referencia a T0
-
es la desviación de temperatura respecto a
-
es el coeficiente de temperatura del conductor especificado a 0 °C, interesa que sea de gran valor y constante con la temperatura
Los materiales empleados para la construcción de sensores RTD suelen ser conductores tales como el cobre, el níquel o el platino. Las propiedades de algunos de éstos se muestran en la siguiente tabla:
depende del valor del flujo, sino también de los estados magnéticos anteriores. En el caso de los transformadores, al someter el material magnético a un flujo variable se produce una imantación que se mantiene al cesar el flujo variable, lo que provoca una pérdida de energía que se justifica en forma de calor.
De todos ellos es el platino el que ofrece mejores prestaciones, como:
-
alta resistividad… para un mismo valor óhmico, la masa del sensor será menor, por lo que la respuesta será más rápida
-
margen de temperatura mayor
-
alta linealidad
-
sin embargo, su sensibilidad Alpha es menor.
Un sensor muy común es el Pt100 (RTD de platino con R=100 Ohm a 0 °C). En la siguiente tabla se muestran valores estándar de resistencia a distintas temperaturas para un sensor Pt100 con Alpha = 0.00385 K^(-1).
4.3. Sensor de Distancia Ultrasonico:
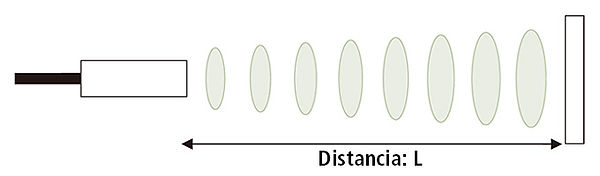
Como su nombre lo indica, los sensores ultrasónicos miden la distancia mediante el uso de ondas ultrasónicas. El cabezal emite una onda ultrasónica y recibe la onda reflejada que retorna desde el objeto. Los sensores ultrasónicos miden la distancia al objeto contando el tiempo entre la emisión y la recepción.
Un sensor óptico tiene un transmisor y receptor, mientras que un sensor ultrasónico utiliza un elemento ultrasónico único, tanto para la emisión como la recepción. En un sensor ultrasónico de modelo reflectivo, un solo oscilador emite y recibe las ondas ultrasónicas, alternativamente. Esto permite la miniaturización del cabezal del sensor.
[Cálculo de la distancia con el Sensor Ultrasonico]
La distancia se puede calcular con la siguiente fórmula:
Distancia L = 1/2 × T × C
donde L es la distancia, T es el tiempo entre la emisión y la recepción, y C es la velocidad del sonido. (El valor se multiplica por 1/2 ya que T es el tiempo de recorrido de ida y vuelta).
Características
La siguiente lista muestra las características típicas habilitadas por el sistema de detección.
[Objeto transparente detectable]
Dado que las ondas ultrasónicas pueden reflejarse en una superficie de vidrio o líquido, y retornar al cabezal, incluso los objetos transparentes pueden ser detectados.
[Resistente a niebla y suciedad]
La detección no se ve afectada por la acumulación de polvo o suciedad.
[Objetos de forma compleja detectables]
La detección de presencia es estable, incluso para objetos tales como bandejas de malla o resortes.
4.4. Sensor de Movimiento PIR:
Como su nombre lo indica, los sensores ultrasónicos miden la distancia mediante el uso de ondas ultrasónicas. El cabezal emite una onda ultrasónica y recibe la onda reflejada que retorna desde el objeto. Los sensores ultrasónicos miden la distancia al objeto contando el tiempo entre la emisión y la recepción.
Lo primero que debemos saber es que existen muchos tipos de sensores de movimiento, algunos pueden detectar hasta la distancia de los objetos y la dirección en la que van dirigidos. Nosotros en este tutorial vamos a usar el sensor mas sencillo que existe: Sensor PIR.
FUNCIONAMIENTO:
Primero tenemos que conectar el sensor a la corriente.
-
Conectamos el pin VCC de 5 a 12 Volts.
-
Después conectamos el cable o pin de en medio a tierra.
-
Dejamos el sensor unos segundos a que se calibre y esta listo para medir las señales.
Este sensor lo que va a hacer es:
-
Al detectar movimiento va a poner su pin de señal en 0 Volts ( o tierra).
-
Cuando NO detecte ningún movimiento su pin de señal va a ser igual a 5V.
USO:
La forma mas fácil en la que podemos utilizar el sensor de movimiento es con arduino, (también lo podemos utilizar con un contador 555 lo cual explicare en el siguiente paso pues es mas barato). Como podemos ver en la imagen, necesitamos solo una resistencia de 10KOhms. Conectamos el voltaje a 5V, el pin de en medio a tierra y el pin de señal a 5 volts a través de la resistencia y a el pin 2 de arduino.
CKTO 555:
Si no quieres gastar mucho en tu proyecto, y no quieres gastar tu arduino en un sensor de movimiento. Te entiendo! Puedes usar este circuito utilizando un 555 para reducir costos.
Esta configuración de chip 555 se llama, configuracion monoestable. Pero no se asusten! Lo único que quiere decir esto es que cuando un pin de señal se pone en 0 Volts el chip 555 se enciende por un tiempo determinado que ustedes elijan.
El tiempo se puede calcular con la formula agregada en las imagenes.
Por ejemplo:
si ustedes quieren que cada que su sensor detecte movimiento alguna cosa se prenda cada 20 segundo. Y ustedes tienen un capacitor de 4.7uF
20=1.1*R*4.7uF
R=20/(1.1*4.7uF)
R=3.8KOhms
Ahora ya sabemos que resitencia tenemos que utilizar y que capacitor para poder prender 20 segundos algo cuando detecte movimiento.
Control de Luminarias en Domotica:
En el paso anterior vimos como prender y apagar la salida de un 555 con el sensor de movimiento. Pero, como controlo los focos de mi casa? o el refrigerador? o lo que sea?
Para esto tenemos que agregar en la salida del 555 un circuito pequeño de un transistor y un relevador. Después de esto ya podemos controlar cualquier cosa que funcione con 120v o 220v. Como podemos ver en la imagen se conecta en la señal de salida una resistencia y un transistor y al transistor se le conecta un relevador.





















5. MARCO PROCEDIMENTAL
-
FORMULA 1: "Resistencia del Termistor NTC"
siendo:
Rt= Rntc, el valor de la resistencia a la temperatura T (en grados Kelvin. 0ºC=273,15ºK).
A = una constante que depende del termistor NTC, y representa el valor de la resistencia del termistor NTC cuando la temperatura es supuestamente infinita.
e= Numero de Euler=2,71828
B = es la resistencia característica del material de que está hecho el termistor NTC. Su valor esta comprendido entre 2000ºK y 4000ºK.
FORMULA ANIDADA: Calculo de las constantes A y B:
Los fabricantes no suelen dar los valores de A y B por lo que hay que calcularlos según los valores de la resistencia RT a diferentes temperaturas. Para ello se realiza la siguiente consideración:
de donde igualando A para dos valores de R0 y T0 se obtiene:
de donde despejando B:
siendo R1 y R2 las resistencias del termistor NTC a las temperaturas T1 y T2 respectivamente. Una vez conocido B se puede calcular el valor de A sin más que sustituirlo en la ecuación (2) para una temperatura y resistencia de referencia (R0 y T0 a 25ºC, o 0ºC por ejemplo).
-
FORMULA 2: "Resistencia del Sensor de Temperatura RTD"
donde:
-
R=Rrtd
-
R0 es la resistencia a la temperatura de referencia a T0
-
(Dif_Temp) es la desviación de temperatura respecto a
-
(Alpha) es el coeficiente de temperatura del conductor especificado a 0 °C, interesa que sea de gran valor y constante con la temperatura
-
FORMULA 3: "Cálculo de la distancia con el Sensor Ultrasonico"
La distancia se puede calcular con la siguiente fórmula:
Distancia L = 1/2 × T × C
donde:
L es la distancia, T es el tiempo entre la emisión y la recepción, y C=Vel_Son es la velocidad del sonido. (El valor se multiplica por 1/2 ya que T es el tiempo de recorrido de ida y vuelta).
-
FORMULA 4: "Tiempo de Intermitencia de Luminaria con Sensor de Movimiento PIR"
T= Tiempo
R= Resistencia
C= Capacitancia
6. MARCO PROCEDIMENTAL
6.1. CODIGO C++:
#include <iostream>
#include <math.h>
using namespace std;
//DECLARACION VARIABLES PUBLICAS
double NTC,RTD,UTS,PIR,x,y,z,xp,Rntc,A,a,e=2.72,B,b,T,T0,R0,R1,R2,T1,T2,Rrtd,Dif_Temp,Tf,Alpha,Vel_Son=343.2,Dist,T_e_r,Inicial,Final,R,C;
//FUNCION 1
double Resist_NTC(double T);
//FUNCION 2
double Resist_RTD(double R0,double Alpha,double Dif_Temp);
//FUNCION 3
double Dist_Uts(double T_e_r);
//FUNCION 4
double T_Int_PIR(double R, double C);
int opcion;
int main()
{
cout<<" MENU "<<endl;
cout<<"*******************************************************"<<endl;
cout<<"1. RESISTENCIA DEL TERMISTOR NTC CON FORMULAS ANIDADAS"<<endl;
cout<<"2. RESISTENCIA DEL SENSOR DE TEMPERATURA RTD"<<endl;
cout<<"3. CALCULO DE LA DISTANCIA CON EL SENSOR ULTRASONICO"<<endl;
cout<<"4. TIEMPO DE INTERMITENCIA DE LUMINARIA CON SENSOR DE MOV. PIR"<<endl;
cout<<"**************************************************************"<<endl;
cout<<"SELECCIONA UNA FORMULA: "<<endl;
cin>>opcion;
switch(opcion)
{
case 1:
{
cout<<"1. RESISTENCIA DEL TERMISTOR NTC CON FORMULAS ANIDADAS"<<endl;
cout<<"*****************************************************"<<endl;
cout<<"FORMULA ANIDADA 1: CALCULANDO LA CONSTANTE A:"<<endl;
cout<<"***********************************************"<<endl;
cout<<"Ingrese la Resistencia 1: "; cin>>R1;
cout<<"Ingrese la Resistencia 2: "; cin>>R2;
cout<<"Ingrese la Temperatura 1: "; cin>>T1;
cout<<"Ingrese la Temperatura 2: "; cin>>T2;
//ANIDADO 1
x=log(R1)-log(R2);
y=(1/T1)-(1/T2);
B=x/y;
cout<<"La Constante B es: "<<B<<endl;
{
cout<<"FORMULA ANIDADA 2: CALCULANDO LA CONSTANTE B:"<<endl;
cout<<"***********************************************"<<endl;
cout<<"Ingrese la Resistencia Inicial: "; cin>>R0;
cout<<"Ingrese la Temperatura Inicial: "; cin>>T0;
//ANIDADO 2
xp=-B/T0;
A=R0*pow(e,xp);
cout<<"La Constante A es: "<<A<<endl;
cout<<"CALCULANDO LA RESISTENCIA DEL TERMISTOR NTC:"<<endl;
cout<<"********************************************"<<endl;
cout<<"Ingrese la Temperatura Expuesta del Sensor: "; cin>>T;
//PROCESO
Rntc=Resist_NTC(T);
//RESULTADO
cout<<"EL RESULTADO ES:"<<endl;
cout<<"********************************************"<<endl;
cout<<"La Resistencia del Termistor NTC es: "<<Rntc<<endl;
}
};break;
case 2:
{
cout<<"2. RESISTENCIA DEL SENSOR DE TEMPERATURA RTD"<<endl;
cout<<"*********************************************"<<endl;
cout<<"Ingrese la Resistencia Final de Referencia a T0: "; cin>>Final;
cout<<"Ingrese la Resistencia Inicial de Referencia a T0: "; cin>>Inicial;
cout<<"Ingrese la Temperatura Inicial: "; cin>>T0;
cout<<"Ingrese la Temperatura Final: "; cin>>Tf;
cout<<"Ingrese la Coeficiente de Temperatura: "; cin>>Alpha;
Dif_Temp=Tf-T0;
for(R0=Inicial;R0<=Final;R0=R0+15)
{
//PROCESO
Rrtd=Resist_RTD(R0,Alpha,Dif_Temp);
//RESULTADO
cout<<"EL RESULTADO ES:"<<endl;
cout<<"********************************************"<<endl;
cout<<"El Resistencia del Sensor de Temperatura RTD es: "<<Rrtd<<endl;
}
};break;
case 3:
{
cout<<"3. CALCULO DE LA DISTANCIA CON EL SENSOR ULTRASONICO"<<endl;
cout<<"******************************************************"<<endl;
cout<<"Ingrese el Tiempo entre la Emision y la Recepcion (Seg): "; cin>>T_e_r;
cout<<"La Velocidad de la Luz:343,2 m/s en la Atmosfera Terrestre "<<endl;
//PROCESO
Dist=Dist_Uts(T_e_r);
//RESULTADO
cout<<"EL RESULTADO ES:"<<endl;
cout<<"********************************************"<<endl;
cout<<"La distancia del Objeto sensado al Sensor Ultrasonico es(m): "<<Dist<<endl;
};break;
case 4:
{
cout<<"4. TIEMPO DE INTERMITENCIA DE LUMINARIA CON SENSOR DE MOV. PIR"<<endl;
cout<<"***************************************************************"<<endl;
cout<<"Ingrese la Resistencia: "; cin>>R;
cout<<"Ingrese la Capacitancia: "; cin>>C;
//PROCESO
T=T_Int_PIR(R,C);
//RESULTADO
cout<<"EL RESULTADO ES:"<<endl;
cout<<"********************************************"<<endl;
cout<<"El Tiempo de Intermitencia de Luminaria con Sensor de Movimiento PIR: "<<T<<endl;
};break;
}
}
// ZONA DE FUNCIONES
double Resist_NTC(double T)
{
z=B/T;
NTC=A*pow(e,z);
return NTC;
}
double Resist_RTD(double R0,double Alpha,double Dif_Temp)
{
RTD=R0*(1+Alpha*Dif_Temp);
return RTD;
}
double Dist_Uts(double T_e_r)
{
UTS=(T_e_r*Vel_Son)/2;
return UTS;
}
double T_Int_PIR(double R, double C)
{
PIR=log(3)*R*C;
return PIR;
}


6.2. EJECUCIÓN Y PRUEBAS
FORMULA 1: RESISTENCIA DEL TERMISTOR NTC CON FORMULAS ANIDADAS

FORMULA 2: RESISTENCIA DEL SENSOR DE TEMPERATURA RTD

FORMULA 3: CALCULO DE LA DISTANCIA CON EL SENSOR ULTRASONICO

FORMULA 4: TIEMPO DE INTERMITENCIA DE LUMINARIA CON SENSOR DE MOV. PIR

7. CONCLUSIONES
-
Para obtener una buena estabilidad en los termistores es necesario envejecerlos adecuadamente. Pero el principal inconveniente del termistor es su falta de linealidad.
-
A sido muy útil aprovechar fórmulas de nuestra carrera Electrónica para poder desarrollar estos algoritmos ya que vamos aprendiendo muchas más nuevas fórmulas y comprendiendo su funcionamiento.
8. WEBGRAFIA